HZT-800�ĸ��ؿ��Ը��ݿͻ�Ҫ��������䱸�Ķ���ϵͳ�Լ���ص�ѹ�Ӷ��ı��������أ����ش�3KG~10KG���ȣ������Ч���������ܴﵽ15KG���乤���ķ�Χ�ﵽ�˹��ڶ���ˮƽ��

HZT-800�Ĺ����㷺Ӧ����Ӱ�Ӻ��ġ�������顢���֡�ȡ֤�����ʿ��⡢ң�в�桢ͨ���м̡����⼰������������ҵ������
��տ��̼��ά�ӹ�����
HZT-800ȫ̼��άһ�����̼��ά���ղ�ͬ�ڴֹ���,��ʹ�õIJ��ϴ���Դ�ڽ��ڡ�ÿһ���㲿����Ϊ�ֹ�����,��ô��DZ�֤�����ǿ�Ⱥ�Ư������۵�ͬʱ�����������ֹ��ջ�Ҫ�ᡣ�Ͳ�ƷPLT-800������ȴﵽ2.72�Ĵ�һ���˵�������ƽ̨��������Ҳ����6.5KG���ѡ�

��Ч���ȶ��Ķ���ϵͳ
HZT-800���õ���28.6��ȫ̼��ά���Ľ�,�䱸���ƾ�����Ч��ˢ���,Ч�ʴﵽ�������˻�����ϵͳ�Ķ���ˮƽ��ÿһֻ���͵�������˹����ĵ�ƽ�����ԡ�������һ����ȫ���ɿ������ʵķ���״̬��

�ɿ������˷��п�����
HZT-800���õ����˷��п���������������ʵ�����в�ȡ����Ϣ���ƶ��ɣ���ȫ���ܷdz��ɿ������Ĺ���ǿ��������GPS���ǣ������ٶȷdz��죬�ڿտ��ĵط��������������ﵽ��18�����ϡ�������֧�ֳ���Ĺ�����OSD����ˢ��̨������վ�ȡ�������ˣ��ɻ��ﻹ�䱸�˺�ϻ�ӹ��ܣ�����һӦ��ȫ��
|
�������� |
���� |
ƽ̨���� |
���� |
|
���������� |
30KG |
���γߴ磨mm�� |
2720 * 2720 * 800 |
|
���غ� |
8KG |
��ࣨmm�� |
1985 |
|
����غ� |
15KG |
������ߴ� ��mm�� |
950 * 950 * 800 |
|
Ѳ���ٶ� |
3 ~ 8m/s |
�����ߴ� |
28.6��ȫ̼��ά���Ľ� |
|
��� |
10m/s |
��� |
LY8108-110KV-175KV�ɶ�����ת����ˢ���
LY8115-100KV-150KV�ɶ�����ת����ˢ��� |
|
�������� |
5000�� |
֧�۽ṹ |
�ɲ�ж |
|
���а뾶 |
5KM |
������� |
6S1P * 4 * 22000mAH |
|
ͨѶ���� |
5KM |
ɫ�� |
ŷ��ɫ�壨�ͻ����ƣ� |
|
������ Climbing rate |
5m/s |
|
|
|
��������ʱ�� |
40 ~ 70 ���� |
|
|
|
�� |
��ֱ�� |
|
|
|
�����¶� |
-20��~ +50�� |
|
|
2.�ɿ�ϵͳ����UP-X�������ɿ�
��飺
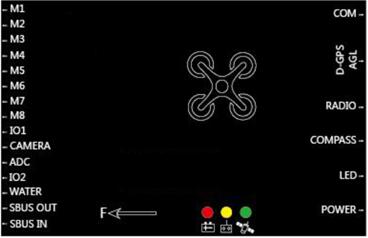
UPx�����˻��ɿ�ϵͳ���������طɿء�����վ������ͨѶ�豸������һ�����ɻ���ϵͳ�����������д�������GPS��ͨѶ��̨�����Կ���ʮ���͡�X�ͼ�4��6��8�ȶ����������ʹ�ü��㣬���ƾ��ȸߣ�GPS�����Զ����й���ǿ�������и�������ӿڣ������û�ʹ�ø��������豸��������������ң������ֱ��ʹ�õ���վ�����Զ���ɡ�ִ��Ԥ�躽���������ָ����У��ؼ��Զ����䡣�Զ�������ʽ���ڵ���վ�Ͽ����������÷���·�ߺͺ��㣬֧�ַ�����ʵʱ�ķ��к�����ķ���Ŀ��㡣�߱�ȫ�Զ��Ĺ��ܡ��߱�����վָ�����ģʽ���߱��ȵ㻷�ƹ��ܡ�
ң������
- ����SBUS���ջ��Լ�����ң����������ң����ʹ��ͨѶ������·��ң�ؾ���Զ����������ǿ���ṩ�������ֽ��ջ�תSBUSģ��
�����
- 8���������ͨ��
- ���18��SBUS����������ͨ��
- ���400Hz������
- ң�������ư�������̬����ģʽ���ٶȿ���ģʽ��һ���ؼҽ���
- ���Կ��ƵĶ���������
1��ʮ����������
2��X��������
3��3��4��6��8�ȶ������������
�ɿع��ܣ�
�������и߶Ȳ���������ʵ��б�¸߶ȿ���
RC ģʽ��ң����������̬����ģʽ
RPVģʽ��ң���������ٶ�ֵ���ɿ��Զ��ȶ����ƣ�������ң��ģʽ��
ָ�����ģʽ������վ��ͼָ�����ģʽ
UAVģʽ��Ԥ�赼����ȫ�Զ���������
CRPVģʽ����Ϸ��ͨ������վ���Ʒ�����
�ȵ㻷��ģʽ�����Ʒ�������ָ�������ĵ㡢�뾶���ٶ���˳ʱ�����ʱ��Բ���˶�����ͷ����һֱָ��Բ�ġ�Ҳ�������ô˹���������Ŀ���Զ����̶ֹ�������Զ����٣�ͬʱ��ͷ����һֱָ��Ŀ�ꡣ
GPS��λ����������ɻ����Կ�UAVģʽ����CPV���й�����GPS����2D��λ�����ǣ�������һ��ʱ����������Զ��������䡣
CRPVģʽͨѶ�����������CRPV��Ϸ��ָ�����ģʽ�³���ͨѶ���루����ͨѶ��·���ϣ����������Զ�ת����UAVģʽ
ң��ʧ�鱣��������ɻ�����RCң��ģʽʱ��������źű����š�������������ϡ���ɻ��ɳ�ң�صĿ��Ʒ�Χʱ�����������������������ص���ɵ㽵�䣬�����Զ�����UAV���߷���ģʽ
��ѹ�Զ���Ᵽ������ѹ�ֶ༶������������Ҫ�趨�Զ��ؼұ�����ѹֵ�;͵ؽ����ѹֵ��
����������30CM��1m
����������10CM��0.5m
ƫ���ࣺ<��1m
��������
- ����˫3��MEMS���ٶȼơ���������, GPS, ������ѹ�߶ȼƣ�3�����ִ�ͨ�������̣���Ӻ���߶ȴ�������ҩ����������
�������ܣ�
- ���ﺽ�������ͣ��Ҳ�ɸı��������ͷָ��
- GPS����������ߺ��߿���
���ƶ�������Ŀ�꺽�����ģʽ���߿��ƶ������غ���亽�߷��У����к��߾���ƫ��1�����ڣ�
- Ŀ�꺽��ɷ�����ʵʱ��
- 100��������
�����ڷ�����ʵʱ�ĺ�·������ã����ظ�ʹ�÷ɹ��ĺ�·��
ÿ����·��������ã��߶ȣ��ٶȣ�����뾶����ͣʱ�䣬u�Ƿ��غ��߷��У��Ƿ�б��ʽ���У����״̬���Ƿ��Զ����䡣
- ���߾߱�ѭ��ģʽ�͵��κ��߷���ģʽ
- �ȵ㻷�Ʒ���ģʽ��
���ֹ����롢��ͼָ����߷�������ǰλ����Ϊ�������ĵ�
���ֹ����롢���߷��е�ǰλ�ÿ�ʼ�Զ����Ʒ��У����������ذ뾶���������뾶��ſ�ʼ�Զ����ơ�
�����û����ٶȺͻ��Ʒ���
��UAVģʽ�£���ͼ��ֱ�ӵ����ʱ��Ҫ�����ĺ��㣬���ﺽ����ͷָ���趨����
ң�⣺
����������
�����Ե��ӿ��Ż��߶�����ն�ʱ���߶������Զ�����
����վ���Կ��Ƹ�����ת2�������Ƶ�����ƽ̨��ͬʱ�����ڶ�������ͣʱ���ƻ�ͷָ��������ͷ3���������
- TF���洢�������ݼ���ƬPOS����
����������
������100 ��
��Դ:
- ����Դ��100mA@7.2V�����뷶Χ5V��60V.
- ������Դ��ѹ����
|